※ 주의사항 ※
본 블로그는 수업 내용을 바탕으로 제가 이해한 부분을 정리한 블로그입니다.
본 내용을 참고로만 보시고, 틀린 부분이 있다면 지적 부탁드립니다!
감사합니다😁
안녕하세요!!
오늘은 아래와 같은 내용을 확인해보겠습니다.
MPS 장비 PLC 제어 (저장공정)
1. MPS 장비 PLC 제어 : 저장공정
1-1. I/O 리스트
| Device | Comment | Device | Comment | Device | Comment | Device | Comment |
| X7C | 축1 BUSY |
X0A | 흡착실린더 후진완료 |
Y27 | 스토퍼실린더 전/후진 |
T30 | 흡착모듈 타이머 |
| X84 | 축1 위치결정 완료신호 |
X0D | 창고실린더 후진완료 |
Y28 | 흡착실린더 전진 |
T31 | 티칭2,티칭3 타이머 |
| X13 | 스토퍼 감지센서 |
X0E | 창고실린더 전진완료 |
Y29 | 흡착실린더 후진 |
T32 | 티칭1 타이머 |
| X0C | 흡착모듈 공작물여부 |
X08 | 스토퍼실린더 상승완료 |
Y2A | 흡착모듈 ON/OFF |
T33 | 티칭4 타이머 |
| X0B | 흡착실린더 전진완료 |
X09 | 스토퍼실린더 하강완료 |
Y2B | 창고실린더 전진 |
C10 | 서보모터 기동카운터 |
| Y2C | 창고실린더 후진 |
- 각 스텝에 대한 비트메모리 어드레스(M41 ~ M49)는 별도로 서술하지 않았습니다!!
1-2. 모션 스텝 다이어그램
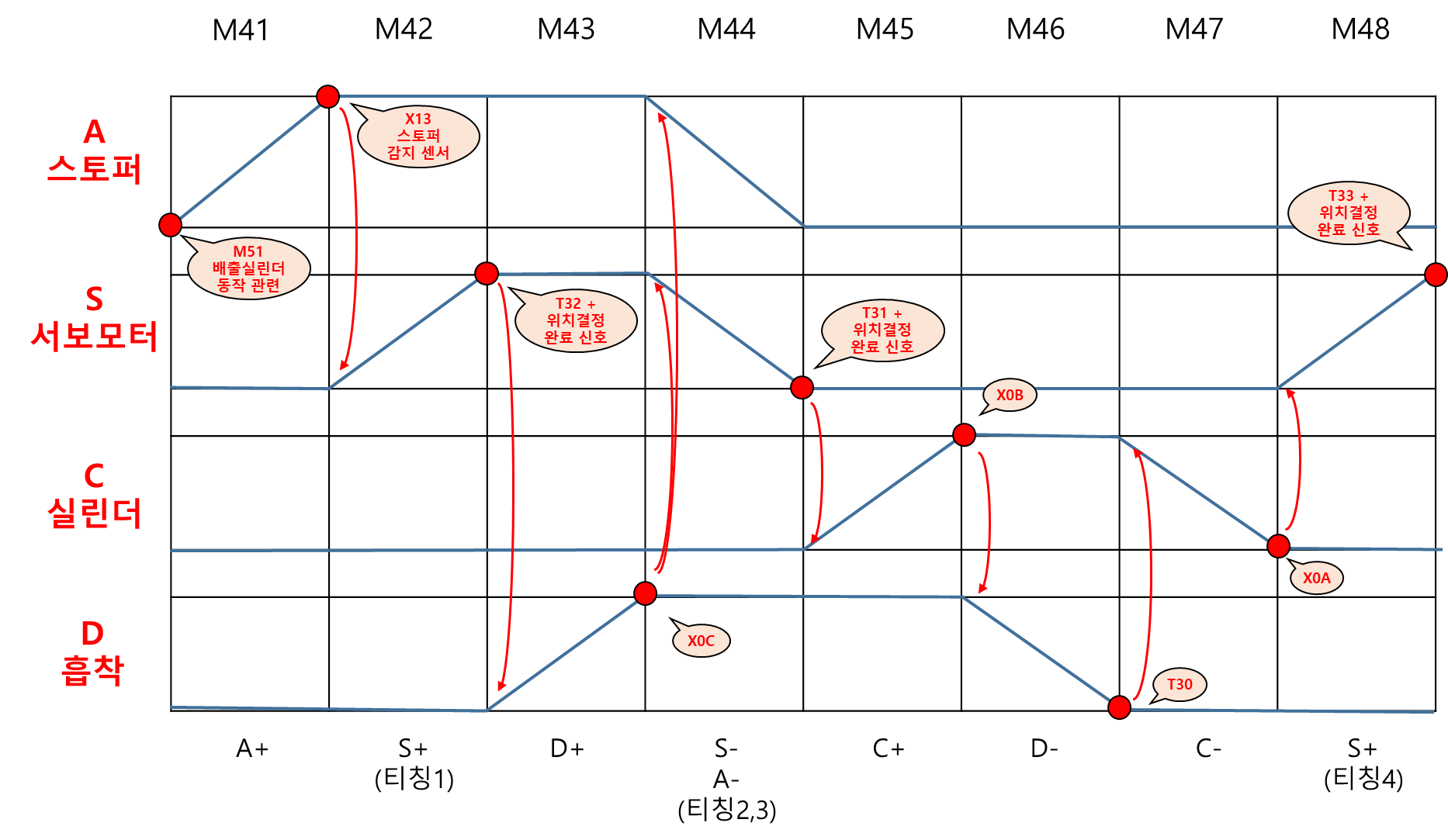
- MPS 장비 저장공정 동작과정 :
스토퍼 하강(M41) → 서보모터 1번 티칭위치로 기동(M42) → 흡착모듈 ON(M43) → 워크피스를 흡착한 상태로 2번 또는 3번 티칭 위치로 기동(M44) + 스토퍼 상승(M44) → 흡착 실린더 전진(M45) → 흡착 모듈 OFF(M46) → 흡착 실린더 후진(M47) → 4번 티칭 위치로 기동(M48) → 티칭위치로 기동 완료 후 종료(M49)
- 서보모터 동작 및 흡착모듈의 안정성을 위해 동작시 타이머를 부여
- 2번 티칭과 3번 티칭의 선택은 카운터의 값에 의해 결정
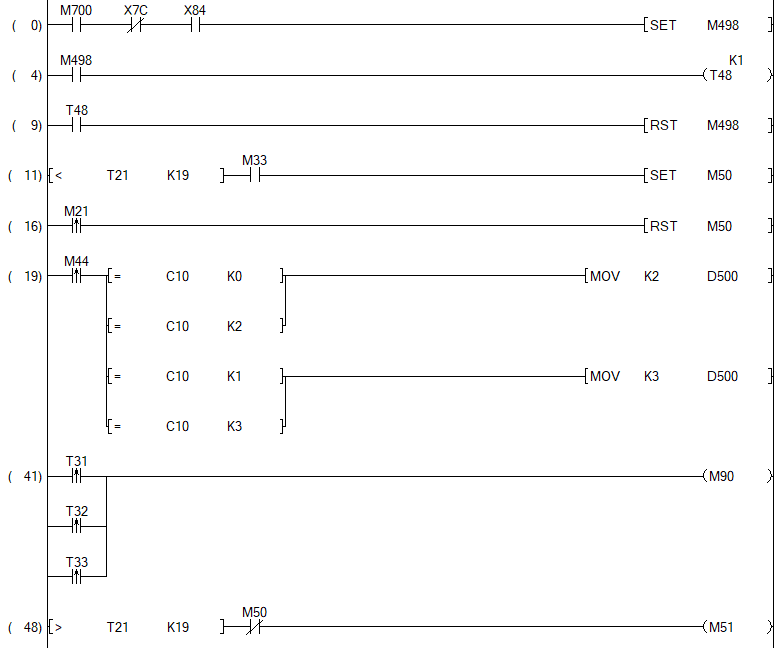
1-3. 래더 프로그램
(1) 서보모터 기동 및 시작신호 관련부
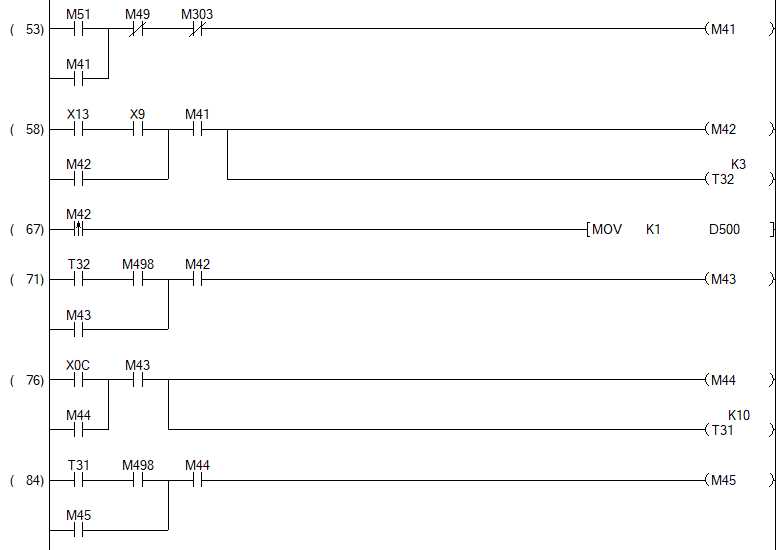
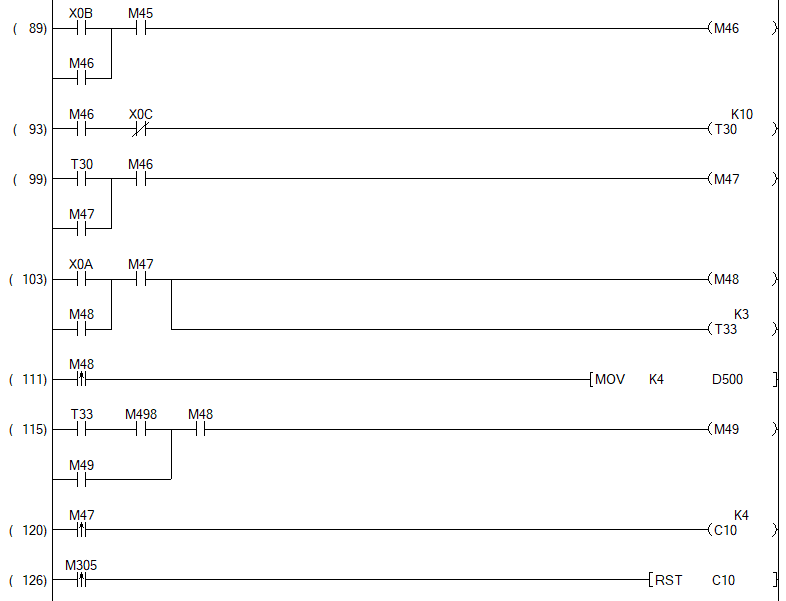
(2) 제어부(A+ / S+ / D+ / S- A- / C+ / D- / C- / A+)
(3) 출력부
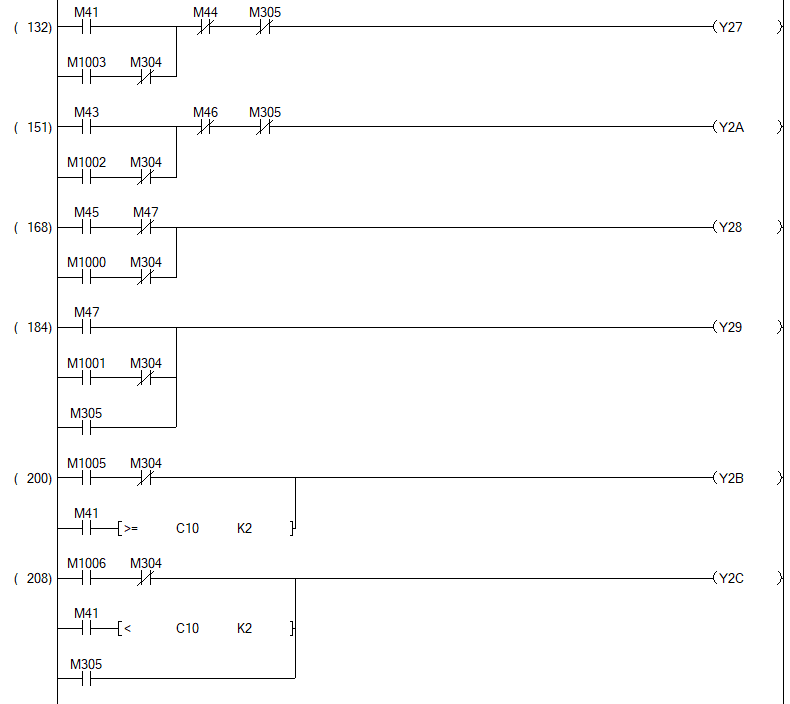
- 래더프로그램의 구체적인 설명은 해당글의 뒤쪽에서 서술하였습니다!!
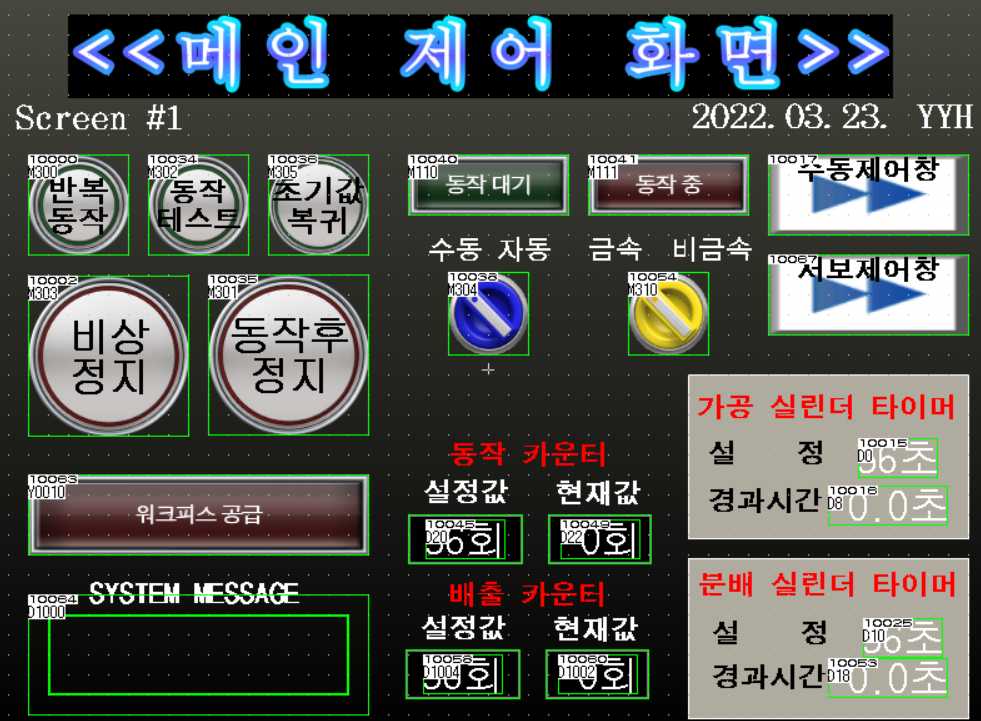
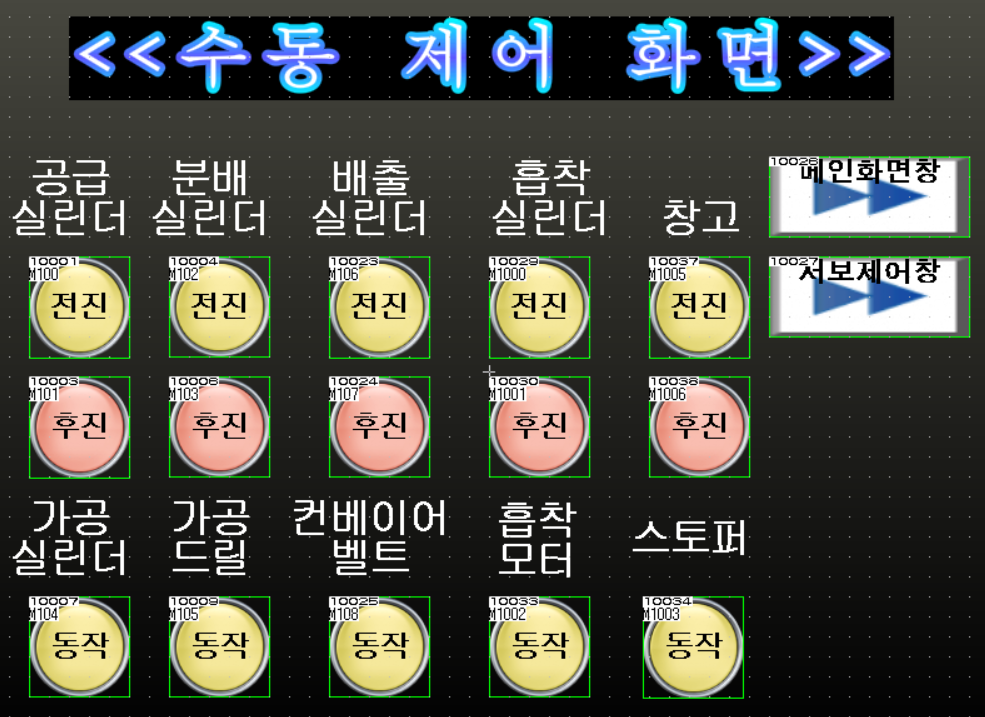
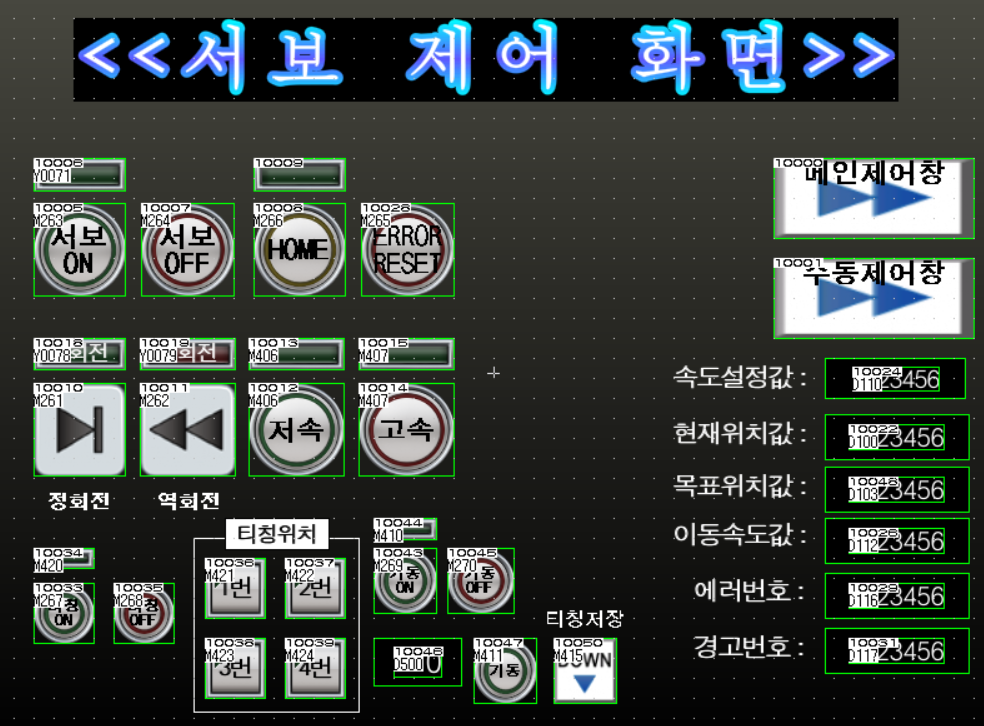
1-4. HMI 디자인
2. MPS 장비 PLC 제어 : 저장공정 (세부내용)
2-1. 기본 저장공정 스텝
(1) 스토퍼 하강(M41)

- 저장공정의 시작과 관련된 신호(M51)은 아래의 "2-3. 저장공정 시작신호 관련" 설명 참고

(2) 서보모터 1번 티칭 위치로 기동(M42)

- 스토퍼가 하강하고 스토퍼감지센서에 워크피스가 감지되면 X13이 B접점이된다.
- 따라서 스토퍼 하강되어 하강센서가 ON되고(X9) 워크피스가 흡착가능한 위치로 들어오면(X13) 서보모터가 동작을 시작한다.
(3) 흡착모듈 ON (M43)

- 서보모터가 기동 후 위치결정이 완료되면 M498이 ON이 된다.
(이와 관련된 내용은 "2-2. 위치결정 완료 신호 관련" 설명 참고)

(4) 2번 또는 3번 티칭 위치로 기동 + 스토퍼 상승(M44)

- 흡착모듈에 공작물이 ON되면(흡착모듈이 ON되어 워크피스가 붙어 있으면) 서보모터가 2번, 3번 티칭 위치로 이동하게 되고 스토퍼는 상승한다.
(5) 흡착실린더 전진(M45)

- 서보모터가 기동 후 위치결정이 완료되면 M498이 ON이 된다.

(6) 흡착모듈 OFF(M46)

- 흡착실린더가 전진해서 해당 센서가 ON이 되면 흡착모듈을 꺼 워크피스를 저장위치에 놓는다.
(7) 흡착실린더 후진(M47)

- 흡착실린더 후진 전에 타이머를 약 0.1초간 부여해서 워크피스가 안정적으로 저장위치에 떨어질 수 있도록 안정성 부여

(8) 4번 티칭 위치로 이동(M48) + 이동 완료 후 저장공정 자기유지 차단(M49)
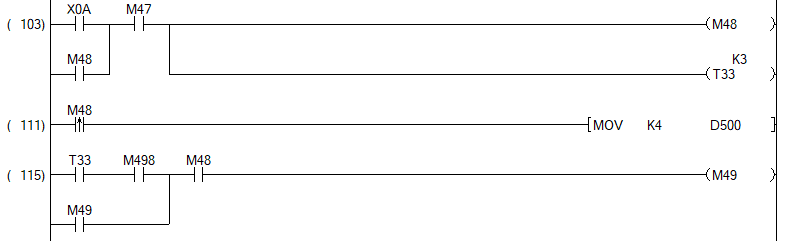
- 흡착실린더가 후진 완료 되면 해당 센서가 ON이 되고 4번 티칭 위치로 기동하게 된다.
- 4번 위치는 다음 워크피스를 빠르게 저장하기 위해 1번 위치 근처의 위치에 해당된다.
- M49가 수행되면 M41에있는 M49의 B접점이 끊어져서 저장공정이 초기화 된다.
2-2. 위치결정 완료 신호 관련

- 서보모터가 원점복귀 또는 티칭위치로 기동을 하다가 완료가 되면 대표적으로 2개의 센서에 변화가 온다.
→ 첫번째, 축의 BUSY 신호(X7C)가 OFF가 된다. 즉 BUSY 신호는 원점복귀나 위치결정동작중일 때 ON이 되고 완료되면 OFF가 된다.
→ 두번째, 위치결정완료 신호(X84)가 ON이 된다.
- 또한 서보모터의 동작 안정성을 위해 타이머를 부여하였고, 타이머 설정시간이 경과하면 자기유지를 해제하여 다음 기동신호를 대기하게 된다.
2-3. 저장공정 시작신호 관련

- 저장공정을 수행하기위한 시작신호를 "배출실린더가 동작하지 않는 경우일때"로 잡았다.
- 이송공정에서 2개의 센서를 사용하여 워크피스를 분류하는 M33을 토대로 공정을 분리하였다.
(M33의 동작순서와 구성은 지난 이송공정 관련 자료를 참고하면 됩니다!!)

- 저장공정의 시작신호(M51)이 스토퍼가 하강하기위한 동작조건(입력신호)가 된다.
2-4. 서보모터 기동(티칭 1~4)

- 저장공정이 수행된 카운터(C10)값에 따라 기동이 수행되는 티칭 값이 2번 또는 3번으로 나뉜다.

- 각 티칭위치로 서보모터 기동수행시(M42, M44, M48) 서보모터의 안정성을 위해 약0.1초의 타이머를 부여

- 타이머가 설정시간이 경과되면 U7\G1500으로 티칭위치의 값을 전달한다.
2-5. 창고 실린더 전후진
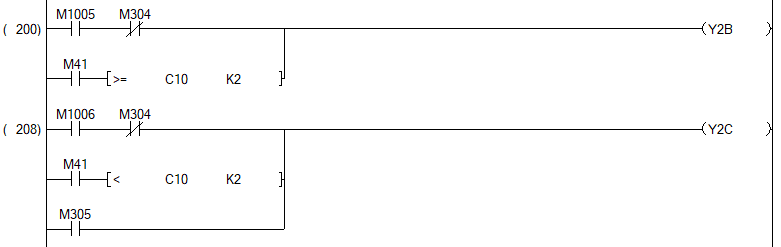
- 창고실린더의 전후진은 저장공정이 시작될때 저장공정이 수행된 카운터(C10)의 값에 따라 전진 또는 후진이 동작된다.




댓글