※ 주의사항 ※
본 블로그는 수업 내용을 바탕으로 제가 이해한 부분을 정리한 블로그입니다.
본 내용을 참고로만 보시고, 틀린 부분이 있다면 지적 부탁드립니다!
감사합니다😁
안녕하세요!!
오늘은 아래와 같은 내용을 확인해보겠습니다.
스텝퍼(Stepper) 공식
스텝퍼(Stepper) 회로 설계
1. 시퀀스(Sequence) 제어 : 스텝퍼 방식 설계
1-1. 스텝퍼 공식
1) 스텝퍼 방식 설계
- 시퀀스 제어를 위해서는 액추에이터(Actuator)가 2개 이상 필요. 본 실습에서는 실린더를 2~3개(A, B, C)를 사용해서 진행
- 2개의 실린더로 동작할 수 있는 경우의 수는 아래의 3가지에 해당
(1) 1번 동작 : A+ B+ A- B- → 간섭 미발생
(2) 2번 동작 : A+ B+ / B- A- → 간섭 한 군데 발생
(3) 3번 동작 : A+ / A- B+ / B- → 간섭 두 군데 발생
※ A+ : A 실린더의 전진을 의미한다 / A- : A 실린더의 후진을 의미한다.
- 1개의 액추에이터가 연속적으로 동작하면 간섭이 발생하기 때문에 그룹으로 나누어서 처리한다.(Cascade 방식)
✔ 위의 3가지 경우 4단계의 동작이기 때문에 애초에 설계를 할때 4단계로 나누어서 설계를 하면 간섭이 발생할 일이 없다.
→ 스텝퍼(Stepper) 방식 : 각 스텝이 싱글 그룹(릴레이 1개)을 가지고 있는 방식을 뜻함.
→ PLC가 보편화 되면서 스텝퍼 방식으로 설계를 해도 생산단가를 맞출 수 있기 때문에 많이 사용되는 방식
2) 스텝퍼(Stepper) 방식 설계 공식
※ Km = (LS + Km) * (Km-1)
✔ LS = 리미트 스위치(입력 요소)
✔ Km = 자기 유지 접점
✔ Km - 1 = Reset (자기유지 회로 해제) / Km 스텝의 전단계 스텝에 해당
1-2. 스텝퍼 방식 설계 기본 예제 - 1 : 양솔(A), 편솔(B) / A+ B+ B- A-


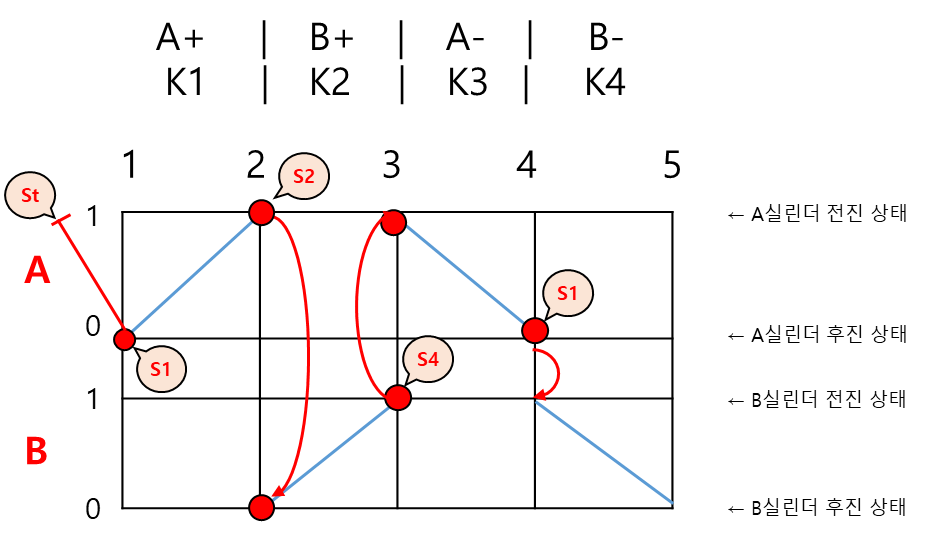
1) 모션 스텝 다이어그램(Motion Step Diagram)

- 각각의 동작에 따른 릴레이를 1개씩 배치할 것
→ 즉, A+ / B+ / B- / A- 총 4개의 릴레이(래더 프로그램상 내부 메모리) 필요
※ 스텝퍼 공식을 활용한 각 스텝 확인
(1) K1 = ((St * S1) + K1) * K4
(2) K2 = (S2 + K2) * K1
(3) K3 = (S4 + K3) * K2
(4) K4 = (S3 + K4) * K3
✔ 각 스텝을 수행하기 위해 선행되어야 할 입력요소(리미트 스위치)가 무엇인지 모션 스텝 다이어그램으로 파악할 것!!!
✔ 위의 다이어그램 기준 B+(B실린더 전진) 동작이 수행되기 위해선 S2 센서가 입력되어야 한다.
(S2센서가 입력됨이라 함은 A실린더가 전진되어 있는지 확인한다는 의미)
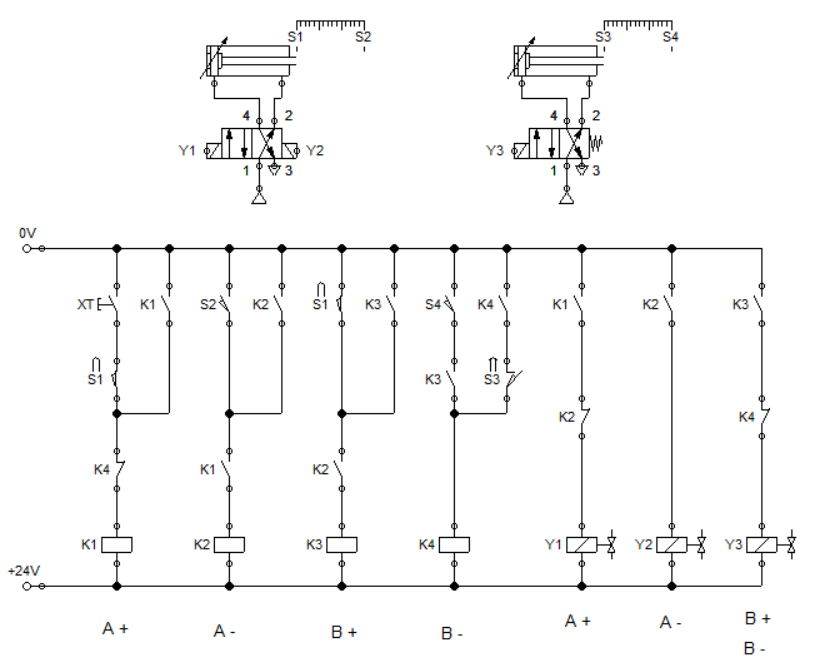
2) 시뮬레이션 프로그램

※ 참고 사항 : K1 및 K4 스텝, 즉 첫번째와 마지막 스텝은 스텝퍼 공식과 살짝 상이하다.
(1) K1 : 스텝퍼 방식 회로의 첫번째 스텝으로써 Start Switch가 S1 센서와 and 결선 되어 있으며, K1 스텝의 이전 스텝은 K4로써 시퀀스적인 개념으로 아직 미동작 상태이기때문에 B접점으로 설계한다.
(2) K4 : 스텝퍼 방식 회로의 마지막 스텝으로써, OFF 우선 회로로 작성시 K4가 여자 되자마자 바로 소자되어서 K4 릴레이에 연결되어있는 Y2솔레노이드가 미처 여자되기 전에 소자되어 동작하지 않고 자기유지해제가 된다. 따라서 ON 우선 회로로 작성하여 1번은 동작하도록 설계하여 릴레이가 여자될 수 있도록 시간을 충분히 준다.
- 위의 시뮬레이션 설계에서 K4릴레이 위에 있는 K3(A접점) 및 K2(A접점)은 오류로 수정 필요.(아래 래더 프로그램 참고 요망)
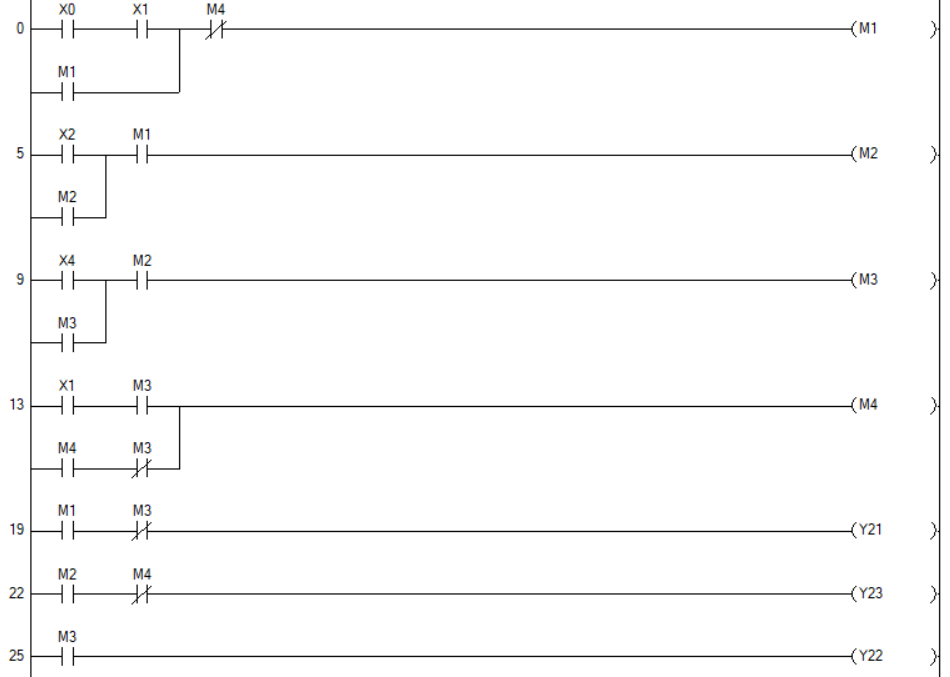
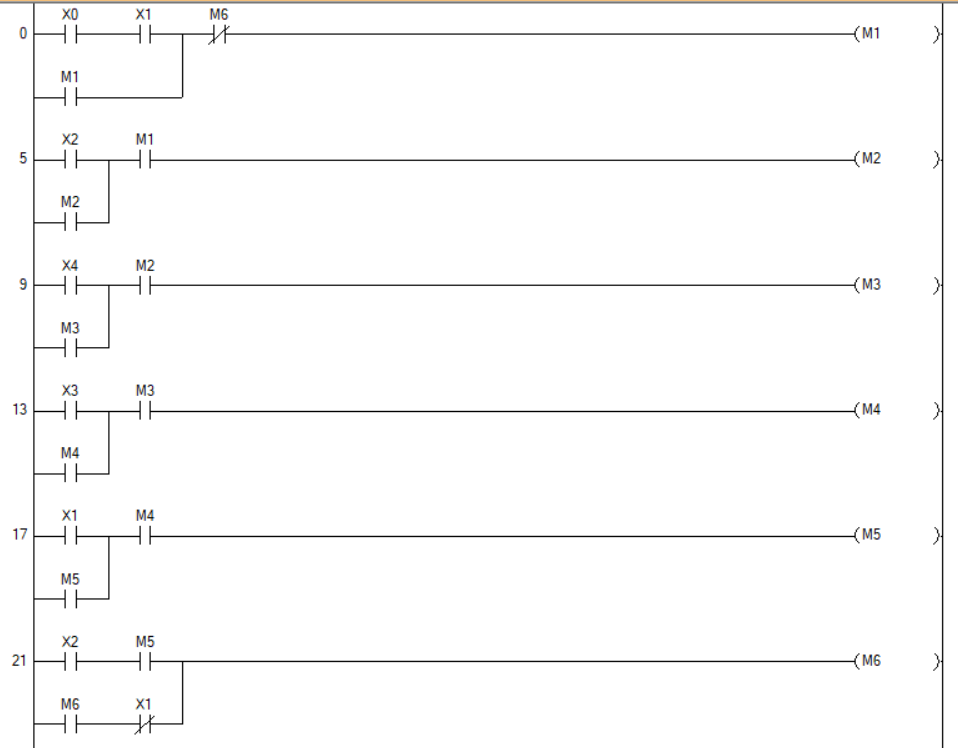
3) 래더 프로그램

1-3. 스텝퍼 방식 설계 기본 예제 - 2 : 양솔(A), 편솔(B) / A+ B+ A- B-
1) 모션 스텝 다이어그램
2) 시뮬레이션 프로그램

3) 래더 프로그램
1-4. 스텝퍼 방식 설계 기본 예제 - 3 : 양솔(A), 편솔(B) / A+ A- B+ B-
1) 모션 스텝 다이어그램

2) 시뮬레이션 프로그램
3) 래더 프로그램

2. 스텝퍼 방식 설계 응용 예제
2-1. 스텝퍼 방식 설계 응용 예제 - 1 : 양솔(A), 편솔(B) / A+ B+ B- A- A+ A-
1) 모션 스텝 다이어그램
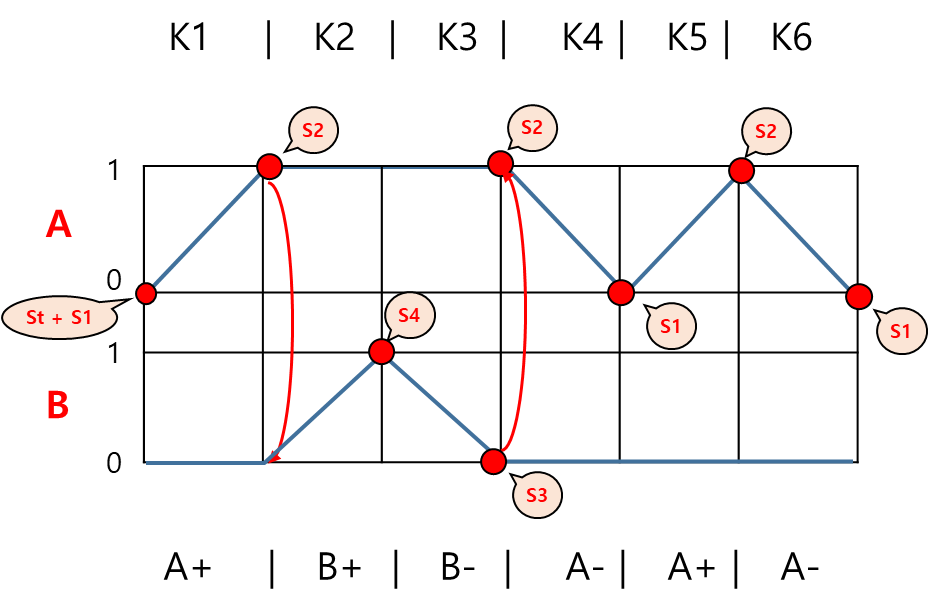
2) 시뮬레이션 프로그램

- 위의 기본 예제와는 다르게 A실린더의 동작이 B실린더 동작 후에 한번 더 수행됨에 따라 출력부(Y1, Y2) 변형
3) 래더 프로그램
(1) 입력부
(2) 출력부

2-2. 스텝퍼 방식 설계 응용 예제 - 2 : 양솔(A), 편솔(B), 편솔(C) / A+ B+ B- C+ C- A-

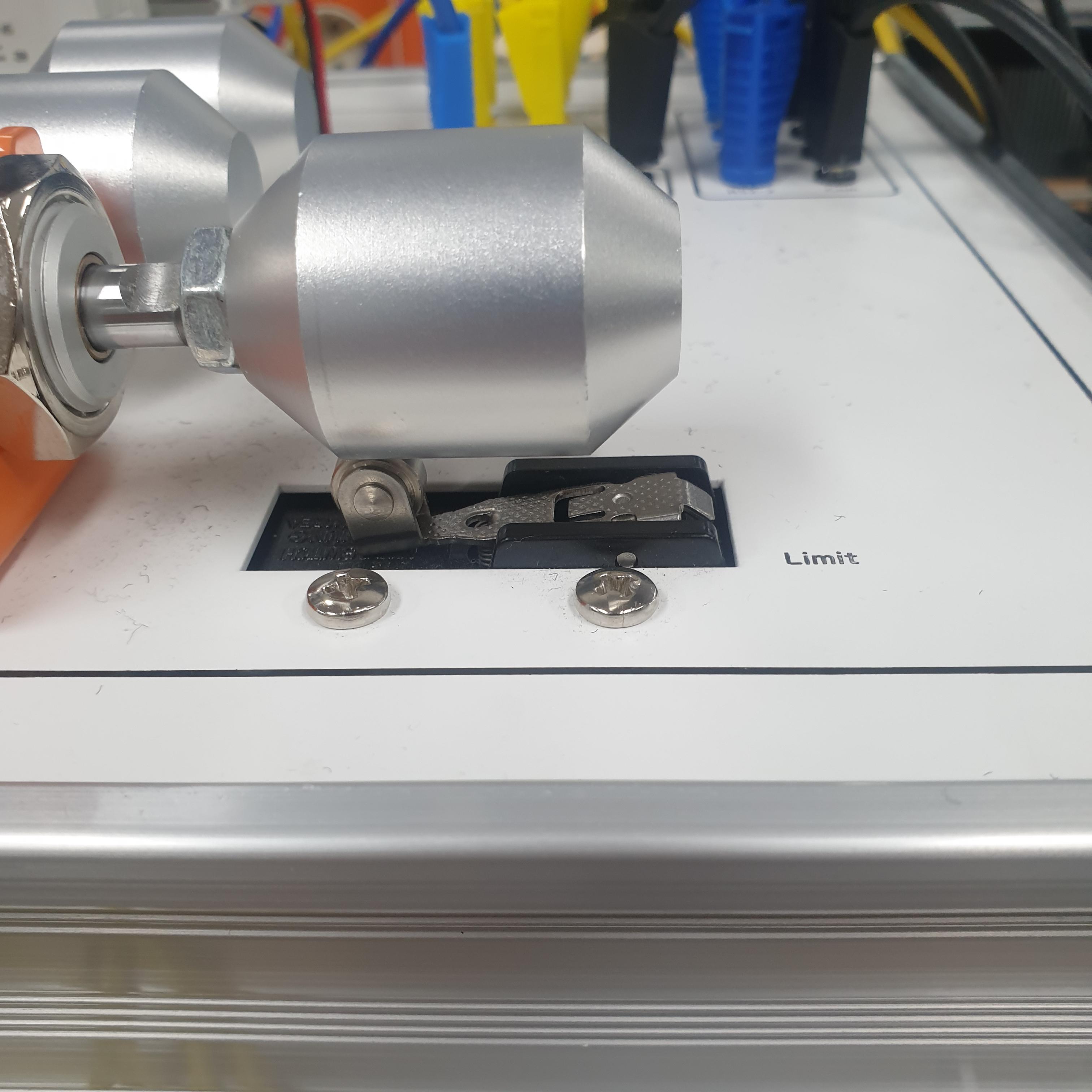
- 본 실습에서 C실린더는 단동실린더로서 편솔밸브로 동작을 제어하고 Read S/W가 아닌 Limit Sensor로 실린더의 위치를 읽어 들임
- 리미트 스위치에 실린더가 닿아 있으면 노말오픈(NO)인 상태로, 평상시 실린더가 후진되어 있으면 NO가 B접점이 되어 있다.
1) 모션 스텝 다이어그램

- S6 대신 S5접점의 반대접점을 사용해서 실린더가 전진되어있음을 확인하고 타이머를 동작해서 일정 시간 후에 자동으로 후진되도록 설계 하였음 (실무에서도 센서가 없으면 타이머로 대체해서 사용하기도 한다고..?)
2) 시뮬레이션 프로그램

- 단동 실린더가 전진했을때 현상을 유지하기 위해 타이머를 부착하여 일정시간동안 전진상태를 유지하도록 하였음
3) 래더 프로그램
(1) 입력부

(2) 출력부





댓글