※ 주의사항 ※
본 블로그는 수업 내용을 바탕으로 제가 이해한 부분을 정리한 블로그입니다.
본 내용을 참고로만 보시고, 틀린 부분이 있다면 지적 부탁드립니다!
감사합니다😁
안녕하세요!!
오늘은 아래와 같은 내용을 확인해보겠습니다.
공압 Actuator
공압 Valve
Pilot 제어
1. 공압(pneumatic) 기초
1-1. 공압 시스템

✔ 대기압(1 bar)보다 높은 압력의 압축 공기를 사용해서 압력 에너지를 운동(기계) 에너지로 변환
- 일반적으로 1.5bar 이상의 압력의 공기를 공압이라 칭함
→ 실제 실무 및 실습에서는 3~4bar 사이의 공압을 사용(공압 MAX = 7bar)
※ 공압 시스템의 최대 단점
(공압 시스템의 장단점은 이미 인터넷상에 많이 배포되었기 때문에 생략하겠습니다.!!!😁)
- 역학적 사용의 한계 : 공압 실린더의 활용성 미비
→ 유압 실린더에 비해 작업 압력의 한계가 존재
ex) 땅을 파는데 사용되는 실린더는 공압으로는 불가능해서 유압을 사용
1-2. 공압 Actuator

- 압축공기 Energy를 기계적 Energy로 바꾸는 기계 장치
- 운동의 종류 : 직선운동(실린더 - Cylinder) / 회전운동(모터 - Motor)
(직선 운동을 하는 리니어 모터도 존재는 하지만 구조적으로 복잡하고 고가에 해당)
1) 단동 실린더


※ 앞으로 이후 모든 PLC 교육은 공유압 시뮬레이터 프로그램(FluidSIM-P Demo)을 사용해서 설계 및 실습을 진행합니다!!
- 파일롯 컨트롤 방식에 주로 사용되는 실린더
- 내부 스프링에 의해서 전진되었던 실린더 로드가 자동으로 후진(복귀) 한다.
2) 복동 실린더


- 메모리 컨트롤 방식에 주로 사용되는 실린더
- 밸브 솔레노이드에 의해 실린더 로드가 전진 및 후진을 한다.
3) 특수형 실린더
※ 다양한 특수형 실린더가 존재(중요한 내용은 아님으로 생략)
1-3. 공압 Valve
1) 기능에 따른 분류


- 방향제어 Valeve : 방향 전환
- Non-return Valve : 회기하지 못하는 밸브(Check Valve)
- 유량제어 Valve : 유량 흐름 제어
- 압력제어 Valve : 압력 변화
- Shut-off Valve : 유로 개폐
2) 회로 도면상 밸브 표시법

- 사각형의 개수는 밸브 전환 위치의 개수를 나타낸다.
- 사각형 내의 화살표는 공압 ON, 사각형 내의 직각은 공압 OFF(차단위치 표시)
- 직선은 유로, 화살표는 흐르는 방향
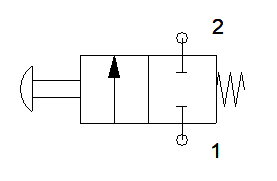
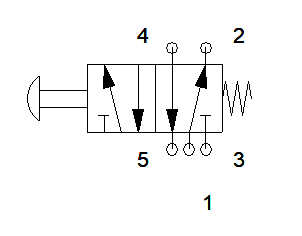
- 밸브의 방향 전환 방법 및 귀환 방법은 사각형의 좌, 우측에 표시한다
- 밸브 연결구 숫자별 구분
| ISO - 1219 | ISO - 5599 | |
| 작업 라인 | A, B, C, ... | 2, 4, ... |
| 공급 라인 | P | 1 |
| 배기구 | R, S, T(유압), ... | 3, 5, ... |
| 베어라인 | Z, Y, X, ... | 10, 12, 14, ... |
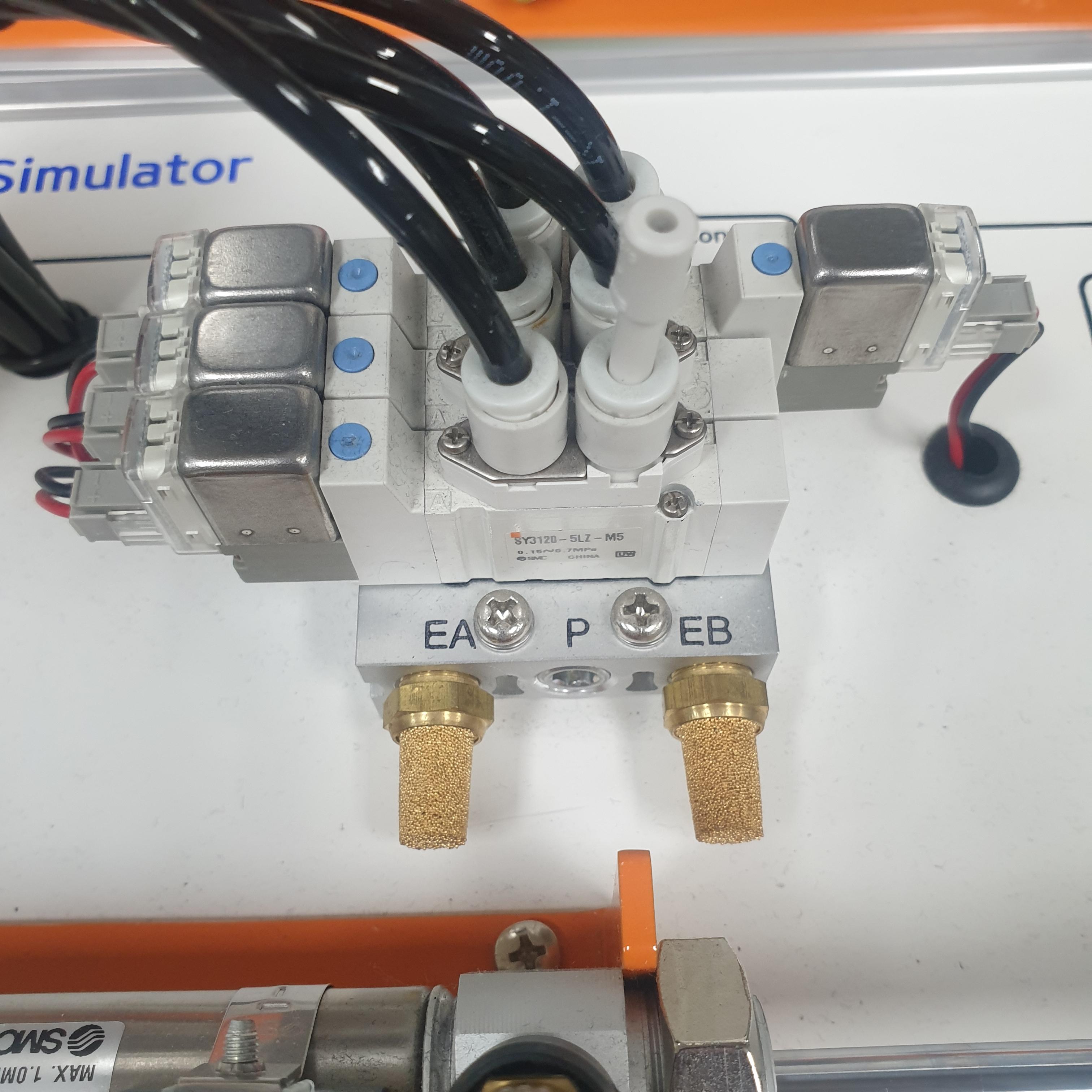
3) 솔레노이드 밸브
- 공압이 아닌 전기 신호로 밸브의 방향을 변환 하는 밸브
- 직접 작동형 솔레노이드 밸브 : 전기가 솔레노이드에 직접 인가 (저렴한 단가 및 좋은 내구성)
- 간접 작동형 솔레노이드 밸브 : 전기가 공급되면 내부의 파이롯을 작동시킨 다음에 밸브 동작
(적은 전기 소모량, 밸브 변환 시간 빠름, 적은 소음)
※ 간접 작동형 솔레노이드 코일
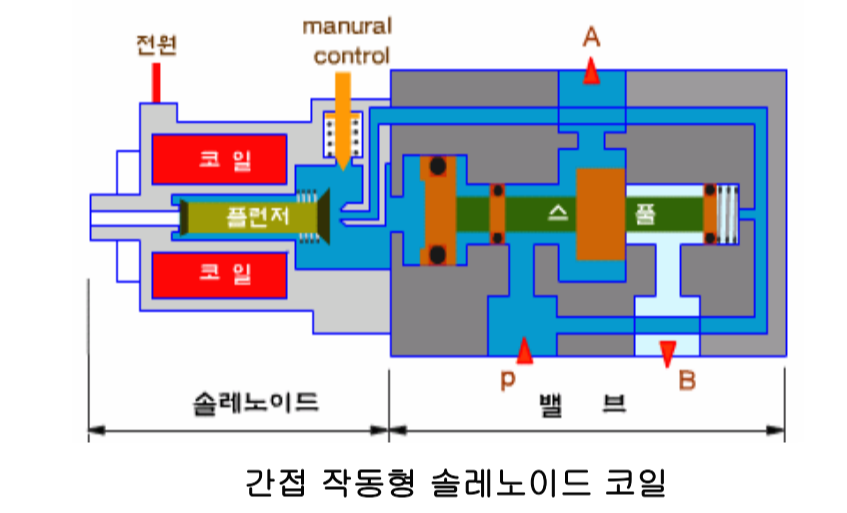
(1) 플린저의 움직임으로 구멍을 막아 공기의 흐름을 차단
(2) 플린저가 열려서 에어가 들어가면 스풀을 움직이게 된다.
(3) 플린저만 움직이면 되기 때문에 밸브 사이즈가 작아짐
(4) 코일이 플린저를 밀고 플린저가 스풀을 밀면 간접작동
(5) 코일이 스플을 밀면 직접 작동형에 해당
2. Pilot 제어
2-1. 제어 종류
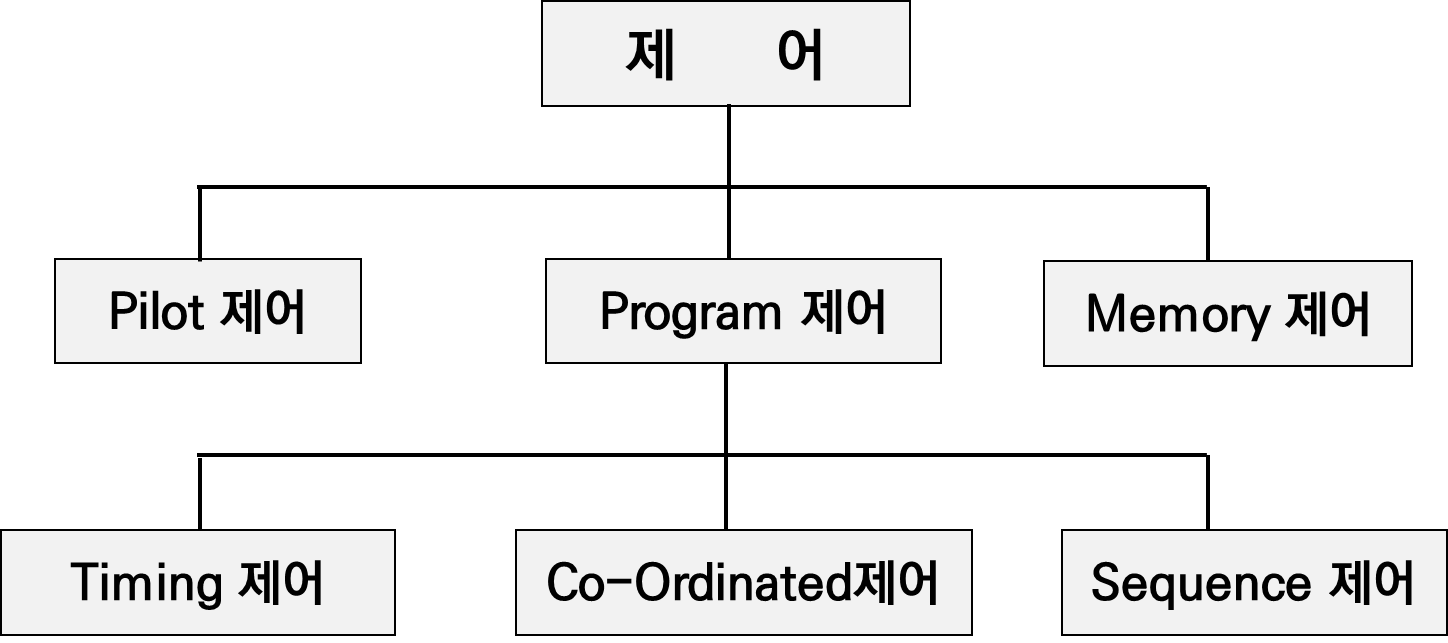
1) 파일롯(Pilot) 제어 : 입력이 있을때 출력이 나가고, 입력을 제거하면 출력이 제거된다 (ex. Push Button)
2) 메모리(Memory) 제어 : 입력이 있을때 출력이 나가는건 동일하지만, 출력을 제거하기 위해서는 한번 더 입력을 주거야 한다 (ex. 형광등 스위치 - Toggle Switch)
3) 시퀀스(Sequence) 제어 : Sensor를 사용해서 절차적 제어 방법, 각 공정 및 단계마다 에러 검출 용이
4) 타이밍(Timing) 제어 : 타임 스케쥴에 따른 제어 방법, 에러 발생시 검출이 힘들지만 가격이 저렴
5) 코디네이터(Co-Ordinated) 제어 : 타이밍 컨트롤(10%) + 시퀀스 컨트롤(90%)
2-2. Pilot 제어 예제
※ Pilot Control : 요구되는 입력 조건이 만족되면 상응하는 출력신호가 발생(메모리 기능 X)
1) 예제 - 1 : Logic Operation
- 문제 : Push Button Switch S1, S2가 작동되고 S3가 작동되지 않든지 또는 S4와 S5가 작동되면 램프 H1에 불이 켜져야 한다.
→ H1 = (S1 & S2 & !S3) + (S4 & S5)
- 래더 프로그램

- 공압 시뮬레이터 프로그램
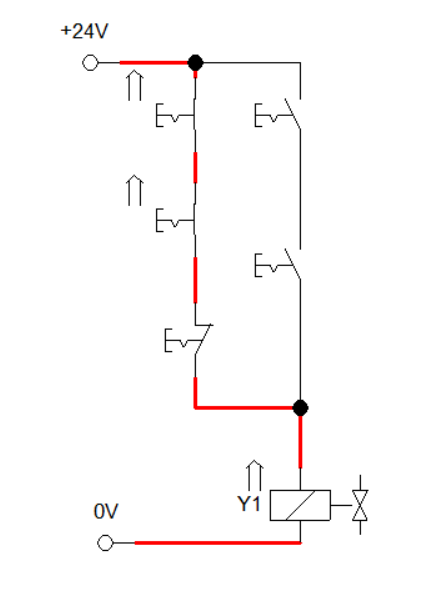
- 램프H1대신 솔레노이드 밸브를 출력단에 부착한 시뮬레이터
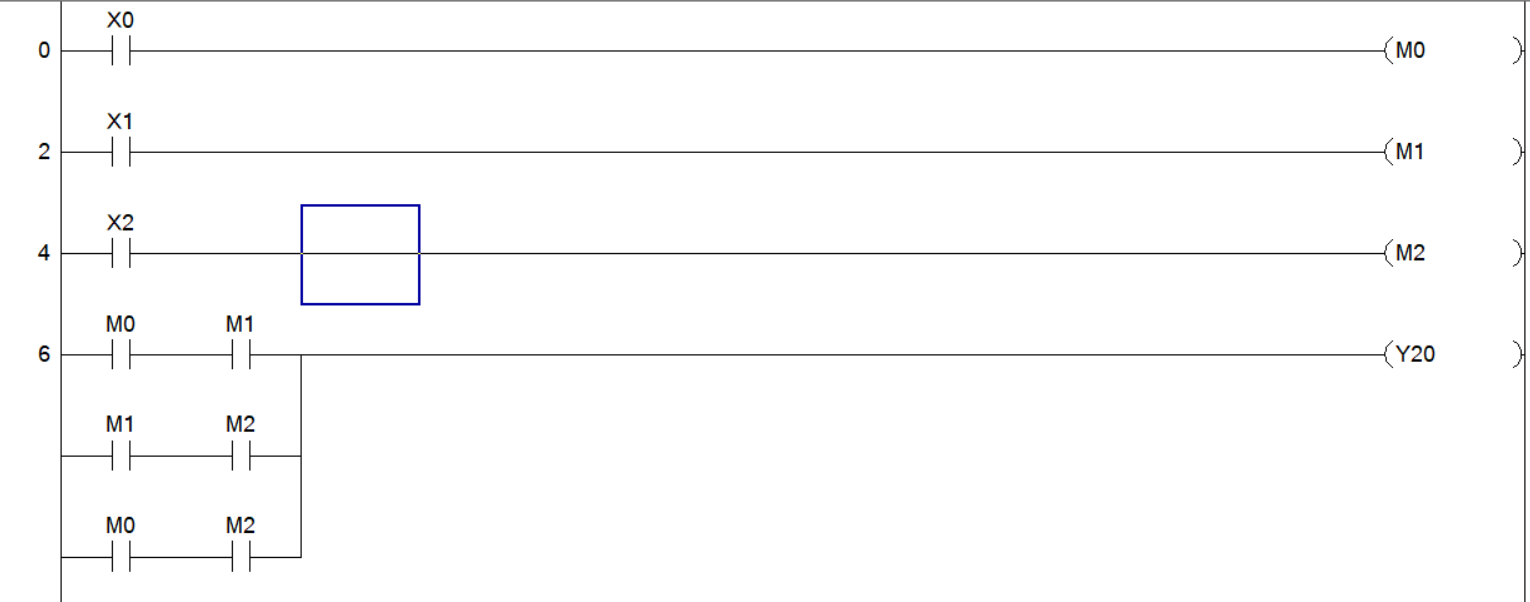
2) 예제 - 2 : Punching Device
- 문제 : 가공물은 3방향에서 이송될 수 있으며, 가공물을 확인하기 위한 Sensor a,b,c 3개(스위치)가 설치되어 있어, 가공물이 입력되면 2개의 센서가 작동되도록 되어 있다. A.B.C 중 2개의 센서가 작동되면 공압 실린더가 펀칭작업을 해야한다.
- 래더 프로그램 (본인 작성본)
- 공압 시뮬레이터 프로그램
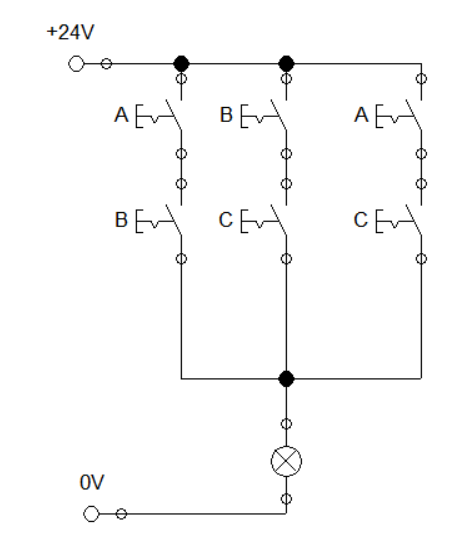

- 두개다 동작 과정은 동일하나 논리연산표에 의한 정확한 설계 및 프로그램 방법은 오른쪽에 해당된다.
※ 첫 수업으로 이론적인 내용이 대부분이였으며 이론에 해당되는 내용은 제가 정리하는것보다 인터넷상에 좀 더 전문적이고 잘 정리되어있는 정보가 많기 때문에 본 글에서는 생략하였습니다!! 내일은 양솔(복솔)실린더를 사용하여 메모리 컨트롤을 프로그램 하는 것을 실습해보도록 하겠습니다!!😁👍
'대한상공회의소 스마트팩토리 교육 > PLC 프로그래밍' 카테고리의 다른 글
| [프로젝트]디지털 스마트팩토리 개발 «수업-3» : Stepper 공식 / Stepper 회로 설계 (편솔 및 양솔) (0) | 2022.03.17 |
|---|---|
| [프로젝트]디지털 스마트팩토리 개발 «수업-2» : Memory 제어(복동 실린더 편솔 밸브 / 복동 실린더 양솔 밸브) (0) | 2022.03.16 |
| [PLC 프로그래밍] 지멘스 PLC 구조화 프로그램 (0) | 2022.01.21 |
| [PLC 프로그래밍] 지멘스 PLC 기초 프로그램 (0) | 2022.01.20 |
| [PLC 프로그래밍] Analog Input Module / CC-Link (1) | 2022.01.19 |




댓글